En raison de limitations techniques, la typographie souhaitable du titre, « Mécanique 1 (PCSI) : Description et paramétrage du mouvement d'un point : Mouvement de vecteur accélération constant Mécanique 1 (PCSI)/Description et paramétrage du mouvement d'un point : Mouvement de vecteur accélération constant », n'a pu être restituée correctement ci-dessus.
Le vecteur vitesse de , noté , étant lié au vecteur accélération par , on en déduit par intégration «», le vecteur se déterminant à l'aide des C.I. [1] à savoir d'où et par suite
«» avec « le vecteur vitesse initiale du point ».
Expression du vecteur position en fonction du temps, déduction de ses composantes cartésiennesmodifier
Le vecteur position de , noté , étant lié au vecteur vitesse par , on en déduit par intégration «», le vecteur se déterminant à l'aide des C.I. [1] à savoir d'où et par suite la loi horaire vectorielle de position s'écrit
«» avec « les vecteurs vitesse initiale et position initiale du point ».
Choix du repère cartésien associé au référentiel d'étudemodifier
On choisit [2], l'espace de l'étude étant orienté à droite [3], l'origine en la position initiale , On choisit, l'espace de l'étude étant orienté à droite, l'axe colinéaire au vecteur accélération et de même sens, On choisit, l'espace de l'étude étant orienté à droite, l'axe à l'axe tel que le vecteur vitesse initiale soit dans le plan [4], On choisit, l'espace de l'étude étant orienté à droite, l'axe à l'axe tel que la composante de sa projection sur étant [5] et On choisit, l'espace de l'étude étant orienté à droite, l'axe au plan formé par [6] et tel que le trièdre soit direct [7]c.-à-d. déterminée par la On choisit, l'espace de l'étude étant orienté à droite, l'axe au plan formé par et tel que le trièdre soit direct « règle de la main droite » [8][9],
Déduction des composantes cartésiennes du vecteur position du point Mmodifier
Cas où le vecteur vitesse initiale n'est pas colinéaire au vecteur accélérationmodifier
Choix du repère cartésien dans le référentiel d'étude pour décrire le mouvement d'un point à vecteur accélération constant ayant un vecteur vitesse initiale non colinéaire au précédent
Voir le « choix du repère cartésien associé au référentiel d'étude dans le paragraphe précédent » utilisé dans le schéma ci-contre, les angles du plan étant orientés par le sens précisé sur le schéma et défini par le vecteur unitaire qui lui est , l'angle que fait le vecteur vitesse initiale avec le vecteur accélération est noté [11] ; ci-contre les composantes cartésiennes du vecteur accélération et
ci-contre les composantes cartésiennes du vecteur vitesse initiale ;
les projections respectives sur chaque axe de la loi horaire vectorielle de position «» donnent les projections respectives sur chaque axe «» les projections respectives sur chaque axe correspondant aux trois lois horaires scalaires de position [12], la 2ème établissant la nature plane du mouvement dans le plan [13].
Cas où le vecteur vitesse initiale est colinéaire au vecteur accélérationmodifier
On rappelle que les conditions du problème définissent une direction privilégiée, celle qui est commune à et , sur laquelle on a choisi un axe orienté dans le sens de , On rappelle que les conditions du problème définissent une direction privilégiée, le vecteur vitesse initiale étant alors dans le même sens ou dans le sens opposé, On rappelle que les conditions du problème définissent une direction privilégiée, les deux autres axes et respectivement étant choisis à avec l'origine en ;
ci-contre les composantes cartésiennes du vecteur accélération et ci-contre les composantes cartésiennes du vecteur vitesse initiale [14] ;
les projections respectives sur chaque axe de la loi horaire vectorielle de position «» donnent «» les projections respectives sur chaque axe de la loi horaire vectorielle de position correspondant aux trois lois horaires scalaires de position [12], les projections respectives sur chaque axe de la loi horaire vectorielle de position les deux 1ères la nature rectiligne du mouvement le long de .
Équations cartésiennes paramétrées de la trajectoire, nature de celle-cimodifier
Cas où le vecteur vitesse initiale n'est pas colinéaire au vecteur accélérationmodifier
Les lois horaires scalaires sont aussi les équations cartésiennes paramétriques de la trajectoire,
celle-ci est donc plane dans le plan d'équation cartésienne et
sa 2ème équation cartésienne [15] s'obtient en exprimant à l'aide de la 1ère équation paramétrique et en reportant dans la 3ème ce qui donne, après simplification évidente, sa 2ème équation cartésienne «», équation d'un cylindre parabolique de génératrices à l'axe [16] ;
Cas où le vecteur vitesse initiale est colinéaire au vecteur accélérationmodifier
Les lois horaires scalaires sont aussi les équations cartésiennes paramétriques de la trajectoire dont on tire, sans faire quoi que soit, les deux équations cartésiennes de cette dernière , système d'équations cartésiennes définissant une « trajectoire rectiligne le long de ».
Retour sur le cas où le vecteur vitesse initiale n'est pas colinéaire au vecteur accélérationmodifier
La trajectoire étant parabolique d'équation cartésienne dans le plan de la trajectoire , nous allons déterminer quelques propriétés de cette parabole :
elle possède un axe de symétrie à l'axe sur lequel se trouve son sommet d'abscisse déterminée par la nullité du cœfficient directeur de la tangente à la parabole en ce point soit elle possède un axe de symétrie à l'axe sur lequel se trouve son sommet d'abscisse déterminée par avec et par suite elle possède un axe de symétrie à l'axe sur lequel se trouve son sommet d'abscisse d'où elle possède l'axe de symétrie d'équation «» [19] ;
son sommet a pour abscisse «» et sa cote s'obtient par report de son abscisse dans l'équation cartésienne de la parabole soit son sommet a pour abscisse «» et sa cote «» son sommet d'où les coordonnées du sommet de la parabole : «» [19].
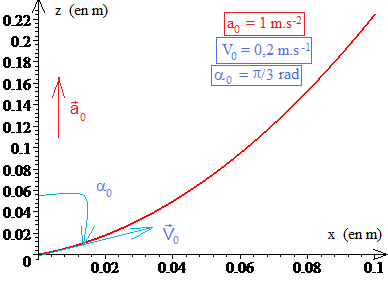
Ci-dessous la trajectoire dans le cas où et , l'angle entre vecteur vitesse initiale et vecteur accélération étant «» pour le graphe de gauche [20], Ci-dessous la trajectoire dans le cas où et , l'angle entre vecteur vitesse initiale et vecteur accélération étant «» pour le graphe de droite [21].
Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse négative
Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse positive et de cote négative
En complément, équations cartésiennes paramétrées de l'hodographe de pôle O du mouvement, nature de celui-cimodifier
Équations cartésiennes paramétrées de l’hodographe de pôle O du mouvement du point Mmodifier
L'hodographe de pôle [22] du mouvement du point étant l'ensemble des positions tel que [23],[24] et notant les coordonnées cartésiennes du point générique de l'hodographe nous obtenons, en projetant sur chaque axe «» [23],[25].
Équations cartésiennes de l’hodographe de pôle O du mouvement du point Mmodifier
Les équations cartésiennes paramétriques [23] de l'hodographe de pôle du mouvement de permettent d'obtenir, sans aucun calcul, les deux équations cartésiennes de l'hodographe de pôle du mouvement de «» [23].
Nature de l’hodographe de pôle O du mouvement du point Mmodifier
L'hodographe de pôle du mouvement de étant d'équations cartésiennes «» [23] L'hodographe de pôle du mouvement de est porté par la droiteà et passant par le point de de coordonnées représentées par ;
tracés de représentés dans le plan , avec et , tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant «» pour l'hodographe de gauche correspondant à une demi-droite tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant issue de du quadrant supérieur droite du plan et tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant allant vers d'ordonnée [26], tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant «» pour l'hodographe de droite correspondant à une demi-droite tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant issue de du quadrant inférieur droite du plan et tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant allant vers d'ordonnée [26] ; tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant le point correspondant au sommet de la trajectoire tracés de représentés dans le plan , l'angle entre vecteur vitesse initiale et vecteur accélération étant est ici observable, c'est le point de placé sur l'axe .
Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire n'est pas observable sur l'hodographe car correspondrait à
Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire correspond au point de l'hodographe
Remarques : De [23] on en déduit que le cœfficient directeur de la direction défini par permet de visualiser la pente du vecteur vitesse Remarques : De on en déduit que sur la trajectoire du point , ceci permettant de constater sur l'hodographe de gauche l'absence de sommet accessible sur la trajectoire Remarques : De on en déduit que et sur l'hodographe de droite l'accessibilité du sommet de la trajectoire correspondant à la position de l'hodographe, Remarques : De on en déduit que la norme de représente celle de soit [23] montrant Remarques : De on en déduit que sur l'hodographe de gauche que jusqu'à l'infini [26] et Remarques : De on en déduit que sur l'hodographe de droite que jusqu'à [23]vitesse minimale obtenue au sommet de la trajectoire puis Remarques : De on en déduit que sur l'hodographe de droite que jusqu'à l'infini [26].
↑ Cela suppose que le vecteur-vitesse initiale n’est pas colinéaire à , si ce n'est pas le cas c.-à-d. si est colinéaire à l'axe est simplement à sans autre exigence il y a donc, dans ce cas, un caractère arbitraire à ce choix.
↑ Elle est nulle dans le cas où est colinéaire à , ce qui conduit, rappelons-le, à un choix arbitraire de à .
↑ Cela suppose que les vecteurs accélération et vitesse initiale forment un plan, si ce n'est pas le cas c.-à-d. si est colinéaire à l'axe est simplement à et avec la même exigence énoncée par la suite du caractère direct du trièdre .
↑ Levant le pouce de la main droite dans le sens du 1er vecteur, l'index pointant dans le sens du 2ème vecteur, « le sens du 3ème vecteur est donné par le majeur courbé vers la paume de la main droite » ceux qui se souviennent de leur enfance pourraient encore appeler cette règle « la règle de l'apprenti cow-boy droitier » ; il existe d'autres règles équivalentes :
« règle de l'auto-stoppeur (droitier) » : l'avant bras droit étant dans le sens du 1er vecteur, la poigne de la main droite courbée dans le sens du 2ème vecteur, le pouce est alors levé dans le sens du 3ème vecteur, « règle du tire-bouchon de Maxwell » : le tire-bouchon tournant du 1er vecteur vers du 2ème, il s'enfonce dans le bouchon fixe dans le sens de du 3ème vecteur, « règle du bonhomme d'Ampère » : le bonhomme d'Ampère se couchant sur la direction du 1er vecteur, ce vecteur lui entrant par les pieds et lui sortant par la tête, regardant droit devant dans le sens du 2ème vecteur, il tend le bras gauche perpendiculairement à son corps dans le sens du 3ème vecteur, et bien d'autres règles que vous pouvez vous-même inventer. James Clerk Maxwell (1831 - 1879) physicien et mathématicien écossais, principalement connu pour ses équations unifiant l'électricité, le magnétisme et l'induction ainsi que pour l'établissement du caractère électromagnétique des ondes lumineuses, mais aussi pour sa distribution des vitesses utilisée dans une description statistique de la théorie cinétique des gaz ; le tire-bouchon fictif permettant de déterminer le caractère direct d'un triplet de vecteurs a été baptisé « tire-bouchon de Maxwell » en son honneur. André-Marie Ampère (1775 - 1836), mathématicien, physicien, chimiste et philosophe français, peut être considéré comme l'un des premiers artisans de la mathématisation de la physique, il a édifié les fondements théoriques de l'électromagnétisme et a découvert les bases de l'électronique de la matière ; c'est lui qui inventa le bonhomme fictif portant son nom et permettant de déterminer le caractère direct d'un triplet de vecteurs.
↑ Voir note « 5 précédente » dans le cas où les vecteurs accélération et vitesse initiale sont colinéaires .
↑ bornes exclues, les deux vecteurs n'étant pas colinéaires.
↑ 12,0 et 12,1 Ou aux trois équations cartésiennes paramétriques de la trajectoire du point .
↑ Qu'on appellera par la suite « plan de lancement » car il est commun au vecteur accélération et au vecteur vitesse initiale.
↑ Avec si est de même sens que et si est de sens opposé à .
↑ On rappelle qu'une courbe est déterminée par deux équations cartésiennes, chacune d'elles définissant une surface, On rappelle qu'une courbe est déterminée par la 1ère équation cartésienne étant définissant le plan , nous cherchons à déterminer On rappelle qu'une courbe est déterminée par la 2ème équation cartésienne et à préciser la nature de la surface qu'elle décrit.
↑ En effet toute équation cartésienne impliciteou non d'un espace à trois dimensions dans laquelle n'apparaît pas est un cylindre de génératrices à l'axe .
↑ Voir le paragraphe « équation cartésienne (d'une parabole de sommet O et d'axe Oy) » du chap. de la leçon « Outils mathématiques pour la physique (PCSI) » en substituant à et en faisant les transformations simplement évoquées sur l'équation annotée , et restant à déterminer.
↑ C.-à-d. dans le sens de compte-tenu du choix de dans le même sens que .
↑ 19,0 et 19,1 On rappelle la formule de trigonométrie suivante .
↑ Le sommet correspondant à une position antérieure à la position initiale n'apparaît pas si on représente la trajectoire à partir de cette dernière.
↑ Le sommet correspondant à une position postérieure à la position initiale apparaît dans la mesure où on représente la trajectoire à partir de cette dernière.
↑ est un point fixe du référentiel d'étude, non nécessairement l'origine du repère associé au référentiel
↑ 23,023,123,223,323,423,523,6 et 23,7 Le symbole signifiant « est représenté par » ou « représentant » suivant contexte, avec définition d'une échelle adaptée.
↑ 26,026,126,2 et 26,3 Le mouvement de sur l'hodographe de pôle de celui de , étant régi par la loi horaire , correspond à une montée d'un mouvement uniforme sur la demi-droite.











































































![{\displaystyle \;V_{0,\,z}{\big ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d3b5dacaaf2f7c8d8f771d82e8045fbe0b2c2693)

















![{\displaystyle \;z_{S}={\dfrac {a_{0}}{2\;V_{0}^{2}\;\sin ^{2}(\alpha _{0})}}\,\left[-{\dfrac {V_{0}^{2}\;\sin(\alpha _{0})\;\cos(\alpha _{0})}{a_{0}}}\right]^{2}+\cot(\alpha _{0})\,\left[-{\dfrac {V_{0}^{2}\;\sin(\alpha _{0})\;\cos(\alpha _{0})}{a_{0}}}\right]=-{\dfrac {V_{0}^{2}\;\cos ^{2}(\alpha _{0})}{2\;a_{0}}}\;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42d7a4908b56a262480cc8ef8d2c250e9493afc8)







 Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse négative
Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse négative Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse positive et de cote négative
Trajectoire d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui et l'origine du repère étant choisi en la position initiale : trajectoire parabolique de concavité dans le sens du vecteur accélération, le sommet étant d'abscisse positive et de cote négative



























 Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire n'est pas observable sur l'hodographe car correspondrait à
Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire n'est pas observable sur l'hodographe car correspondrait à Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire correspond au point de l'hodographe
Hodographe de pôle du mouvement d'un point de vecteur accélération constant, l'axe ayant été choisi le long de ce dernier et étant orienté dans le même sens, le vecteur vitesse initiale faisant l'angle avec lui, le sommet de la trajectoire correspond au point de l'hodographe
















![{\displaystyle {\big ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/31d63350d68291e3f56604a089e0e0b5a86c2472)




![{\displaystyle \;\alpha _{0}\in \left]0\;,\;+\pi \right[\;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d067b4fa0c409db5d8076bd3a1b1991c018db84)













![{\displaystyle \;\alpha _{0}\in \left[0\,,\,+\pi \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/461e1ebfa1b194758e9f09573a97897975c37e88)
